貴州企業(yè)圖像標(biāo)注有哪些
這樣的無(wú)人機(jī)智慧“眼”可以通過(guò)搭載吊艙實(shí)現(xiàn),吊艙內(nèi)置各種規(guī)格的攝像機(jī),能夠?qū)崿F(xiàn)多角度觀察。而智能化則可以在吊艙的基礎(chǔ)上植入高性能AI圖像處理板。圖像處理板能夠?qū)z像機(jī)獲取的圖像進(jìn)行AI智能分析,這樣無(wú)人機(jī)就能夠自動(dòng)識(shí)別缺陷,然后進(jìn)行信息留存、回傳。在這個(gè)領(lǐng)域,成都慧視光電可以根據(jù)需求進(jìn)行多接口圖像處理板的定制,選擇成都慧視開發(fā)的RK3588系列圖像處理板,支持選擇SDI、CVBS、LVDS、USB、cameralink等接口。RK3588擁有6.0TOPS的算力,能夠在各種復(fù)雜環(huán)境進(jìn)行穩(wěn)定工作。板卡和識(shí)別算法的強(qiáng)強(qiáng)聯(lián)合下,無(wú)論白天黑夜,無(wú)人機(jī)都可以實(shí)現(xiàn)自助巡檢,就不需要過(guò)多的人工參與。也是一種降本增效的舉措。SpeedDP是一個(gè)深度學(xué)習(xí)算法開發(fā)平臺(tái)!貴州企業(yè)圖像標(biāo)注有哪些
成都慧視光電技術(shù)有限公司開發(fā)的Viztra-HE030圖像處理板,利用國(guó)產(chǎn)化高性能芯片RK3588開發(fā)而成,它能夠?qū)崿F(xiàn)6.0TOPS的算力,能夠輕松應(yīng)對(duì)糧庫(kù)內(nèi)部復(fù)雜的環(huán)境,成都慧視可以根據(jù)客戶使用的相機(jī)接口進(jìn)行圖像處理板的接口深度定制,實(shí)現(xiàn)快速的AI害蟲識(shí)別。在算法方面,可以使用自己的算法,我司還可以根據(jù)需求定制提供算法性能訓(xùn)練提升工具SpeedDP,平臺(tái)可以通過(guò)大量的糧庫(kù)害蟲AI識(shí)別模型訓(xùn)練,提升自身算法精度,進(jìn)而提升攝像頭害蟲識(shí)別精度。貴州企業(yè)圖像標(biāo)注有哪些SpeedDP提供從數(shù)據(jù)標(biāo)注、模型訓(xùn)練、測(cè)試驗(yàn)證到RockChip嵌入式硬件平臺(tái)模型部署的可視化AI開發(fā)功能。

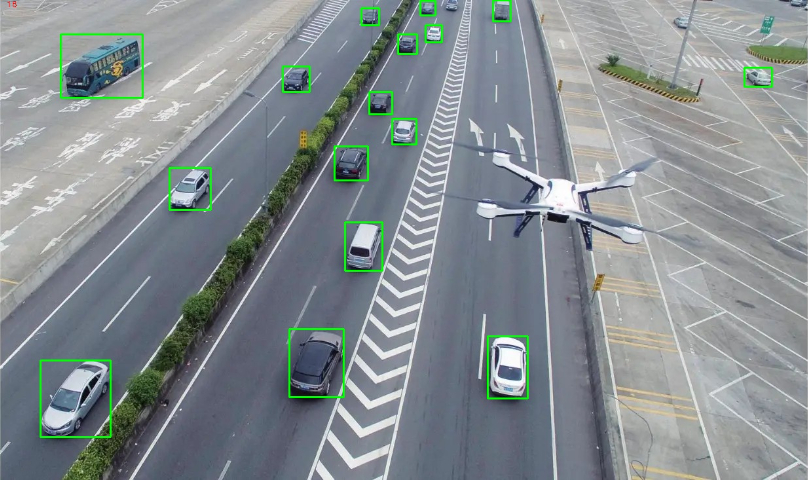
無(wú)人機(jī)只需要從基地起飛,就能夠?qū)χ付▍^(qū)域進(jìn)行巡檢,智能攝像頭能夠自動(dòng)問(wèn)診地面,識(shí)別護(hù)欄錯(cuò)位、路面積水、凹陷、裂縫、交通事故、車流異常等問(wèn)題,然后標(biāo)記位置。而控制中心能夠?qū)崟r(shí)查看前方畫面,接收無(wú)人機(jī)回傳的數(shù)據(jù),并進(jìn)行診斷分析,整個(gè)過(guò)程無(wú)需過(guò)多的人工干預(yù)。這種無(wú)人機(jī)智能問(wèn)診,是通過(guò)向無(wú)人機(jī)植入高性能的AI圖像處理板以及定制專門的目標(biāo)識(shí)別算法來(lái)實(shí)現(xiàn)的。成都慧視開發(fā)的Viztra-LE026圖像處理板,就非常適合用在無(wú)人機(jī)智能化領(lǐng)域。這塊板卡外形呈圓形設(shè)計(jì),尺寸為ф38*12mm,功率不超過(guò)4W,整體呈現(xiàn)功耗低、尺寸小的特點(diǎn)。用在緊湊型的無(wú)人機(jī)當(dāng)中也不會(huì)因?yàn)榭臻g問(wèn)題而苦惱,并且不會(huì)過(guò)多消耗無(wú)人機(jī)的續(xù)航。此外,Viztra-LE026這款圖像處理板采用的是RV1126芯片,2.0TOPS的算力用在路面識(shí)別領(lǐng)域十分合適。
實(shí)現(xiàn)這些功能的技術(shù)中,圖像處理基于AI圖像處理板這一傳感器。板卡具備快速圖像處理識(shí)別的硬件能力,植入相應(yīng)的AI算法,無(wú)人機(jī)就相當(dāng)于裝上了“智慧眼”,而且這個(gè)“智慧眼”居于高空,能夠在一個(gè)定點(diǎn),俯瞰大范圍,實(shí)時(shí)監(jiān)控貨物的存放狀態(tài)。遠(yuǎn)程控制技術(shù)基于網(wǎng)絡(luò)通信,通過(guò)和圖像處理板的結(jié)合,能夠?qū)崿F(xiàn)低延時(shí)低帶寬的圖像傳輸處理。在實(shí)際落地應(yīng)用中,可以采用成都慧視開發(fā)的高性能圖像處理板,其中RV1126系列的Viztra-LE026圖像處理板,就是無(wú)人機(jī)的完美搭子。這款圖像處理板具備2.0TOPS的算力,能夠根據(jù)無(wú)人機(jī)型號(hào)進(jìn)行接口定制,整體尺寸在40mm×40mm×10mm左右(核心板+接口板),小巧的外形即便是小型無(wú)人機(jī)也能夠裝上。此外,板卡整體功耗在4W左右,不會(huì)過(guò)多增加無(wú)人機(jī)的負(fù)擔(dān)。圖像標(biāo)注工具有沒有?
無(wú)人機(jī)的迅猛發(fā)展,使得無(wú)人機(jī)的反制技術(shù)也水漲船高,常見的有電子干擾、無(wú)人機(jī)識(shí)別對(duì)抗等方式。后者采用圖像識(shí)別技術(shù),通過(guò)在無(wú)人機(jī)攝像頭的基礎(chǔ)上加裝AI高性能圖像處理板,在算法的作用下,就具備無(wú)人機(jī)識(shí)別的功能,為無(wú)人機(jī)對(duì)抗創(chuàng)造條件。由于無(wú)人機(jī)飛行速度極快,因此針對(duì)于這樣環(huán)境下的AI識(shí)別需要“與眾不同”的圖像處理板。我們都知道,當(dāng)視頻幀率越高時(shí),視頻越能夠體現(xiàn)畫面細(xì)節(jié)信息,而圖像識(shí)別算法正是逐幀進(jìn)行識(shí)別,因此,攝像頭捕捉到的畫面細(xì)節(jié)越多,識(shí)別的精度就會(huì)越高。海量的數(shù)據(jù)處理很煩心。安徽?qǐng)D像標(biāo)注有哪些
一站式AI訓(xùn)練平臺(tái)SpeedDP。貴州企業(yè)圖像標(biāo)注有哪些
YOLO(YouOnlyLookOnce)是一種目標(biāo)檢測(cè)算法,它使用深度神經(jīng)網(wǎng)絡(luò)模型,特別是卷積神經(jīng)網(wǎng)絡(luò),來(lái)實(shí)時(shí)檢測(cè)和分類對(duì)象。該算法開始被提出是在2016年的論文《YouOnlyLookOnce:統(tǒng)一的實(shí)時(shí)目標(biāo)檢測(cè)》中。自發(fā)布以來(lái),由于其高準(zhǔn)確性和速度,YOLO已成為目標(biāo)檢測(cè)和分類任務(wù)中很受歡迎的算法之一。它在各種目標(biāo)檢測(cè)基準(zhǔn)測(cè)試中實(shí)現(xiàn)了高性能。就在2023年5月初,YOLO-NAS模型被引入到機(jī)器學(xué)習(xí)領(lǐng)域,它擁有更高的精度和速度,超越了其他模型如YOLOv7和YOLOv8。貴州企業(yè)圖像標(biāo)注有哪些
- 江西省時(shí)省力圖像標(biāo)注大概價(jià)格 2025-03-24
- 云南安全圖像標(biāo)注功能 2025-03-24
- 湖南智能化圖像標(biāo)注多少錢 2025-03-24
- 四川實(shí)時(shí)可視化視頻產(chǎn)品什么價(jià)格 2025-03-24
- 北京智能化圖像標(biāo)注大概價(jià)格 2025-03-24
- 黑龍江如何圖像標(biāo)注多少錢 2025-03-24
- 廣東專業(yè)圖像標(biāo)注哪里買 2025-03-24
- 江蘇比較好的圖像標(biāo)注大概價(jià)格 2025-03-24
- 湖北窄帶視頻壓縮與傳輸多路 2025-03-23
- 重慶信息化圖像標(biāo)注什么價(jià)格 2025-03-23
- WM-870工業(yè)高性能USB轉(zhuǎn)TTL轉(zhuǎn)換器生產(chǎn)商 2025-03-24
- 金屬監(jiān)測(cè)lims系統(tǒng)智慧實(shí)驗(yàn)室 2025-03-24
- 天津發(fā)電廠微機(jī)五防廠家 2025-03-24
- 東莞智慧工業(yè)采控一體屏解決方案 2025-03-24
- 蘇州一站式電信業(yè)務(wù)代理支持 2025-03-24
- 山東被動(dòng)無(wú)源式相控陣?yán)走_(dá)報(bào)價(jià) 2025-03-24
- 福建電站高低壓開關(guān)柜清洗 2025-03-24
- 濰坊移動(dòng)端RFID 2025-03-24
- 山東CSFP光模塊源頭直供廠家 2025-03-24
- 區(qū)塊鏈信號(hào)發(fā)生器探頭 2025-03-24