珠海正規晶圓運送機械吸臂生產廠家
輸送半導體晶圓的機械手通常具有兩個以上的自由度。這種機械手典型地由兩個連桿和手部構成。在本說明書中,將兩個連桿稱作上臂連桿和前臂連桿。典型地,上臂連桿的一端連結于電機的輸出軸,上臂連桿的另一端連結于前臂連桿的一端。而且,前臂連桿的另一端連結于手部。上臂連桿和前臂連桿經由關節而連結。前臂連桿和手部也經由關節而連結。在各個關節處安裝有軸承,以便使連桿順暢地旋轉。在輸送半導體晶圓的機械手中,為了不污染傳送室內而屏蔽(shield)安裝于關節的軸承。圖為單軸機械手臂。單軸機械手臂的組件化**降低了工業設計的成本.珠海正規晶圓運送機械吸臂生產廠家
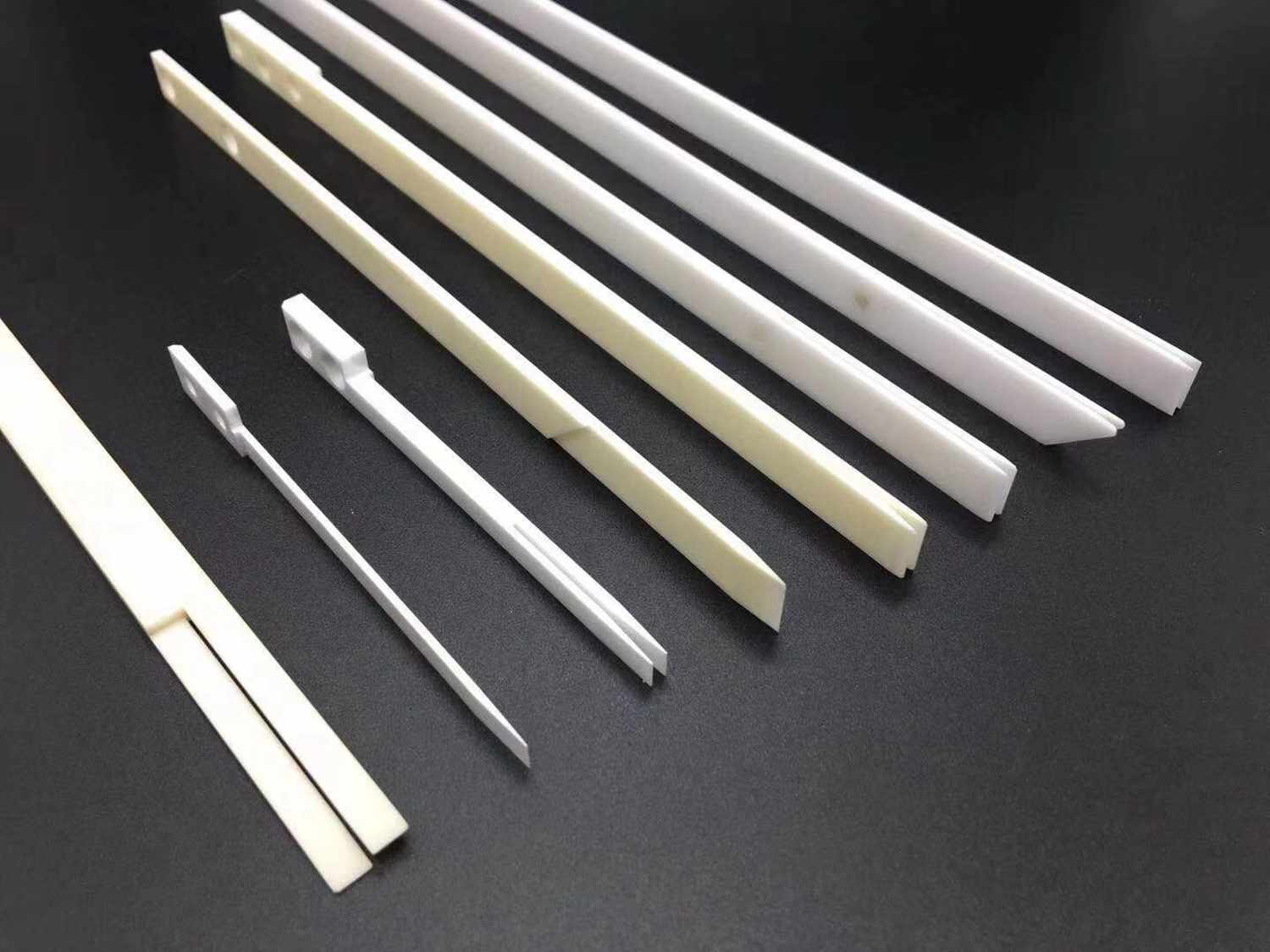
晶圓是半導體行業的關鍵元件,隨著半導體行業的迅速發展,晶圓的搬運技術逐漸成為制約行業發展的關鍵因素。晶圓搬運機械手是IC裝備的**之一,其性能的優劣直接影響晶圓的生產效率和制造質量,體現著整個加工系統的自動化程度和可靠性。在晶圓加工系統中包含兩類晶圓搬運機械手:大氣機械手(FI robot) 和真空機械手(Vacuum robot)。前者將晶圓從晶圓盒中取出并放到預對準設備上,工作環境滿足一定的大氣潔凈度要求,控制精度要求相對較低。后者將晶圓從預對準設備上取下,搬運到各個工位進行刻蝕等工藝流程加工,并將加工完的晶圓搬運到接口位置,等待大氣機械手放回晶圓盒。這些工藝流程需要在真空環境下進行,機械手必須要完全滿足真空潔凈度要求,控制精度和可靠性要求極高。韶關正規晶圓運送機械吸臂銷售詞臂應承載能力大、剛性好、自重輕.
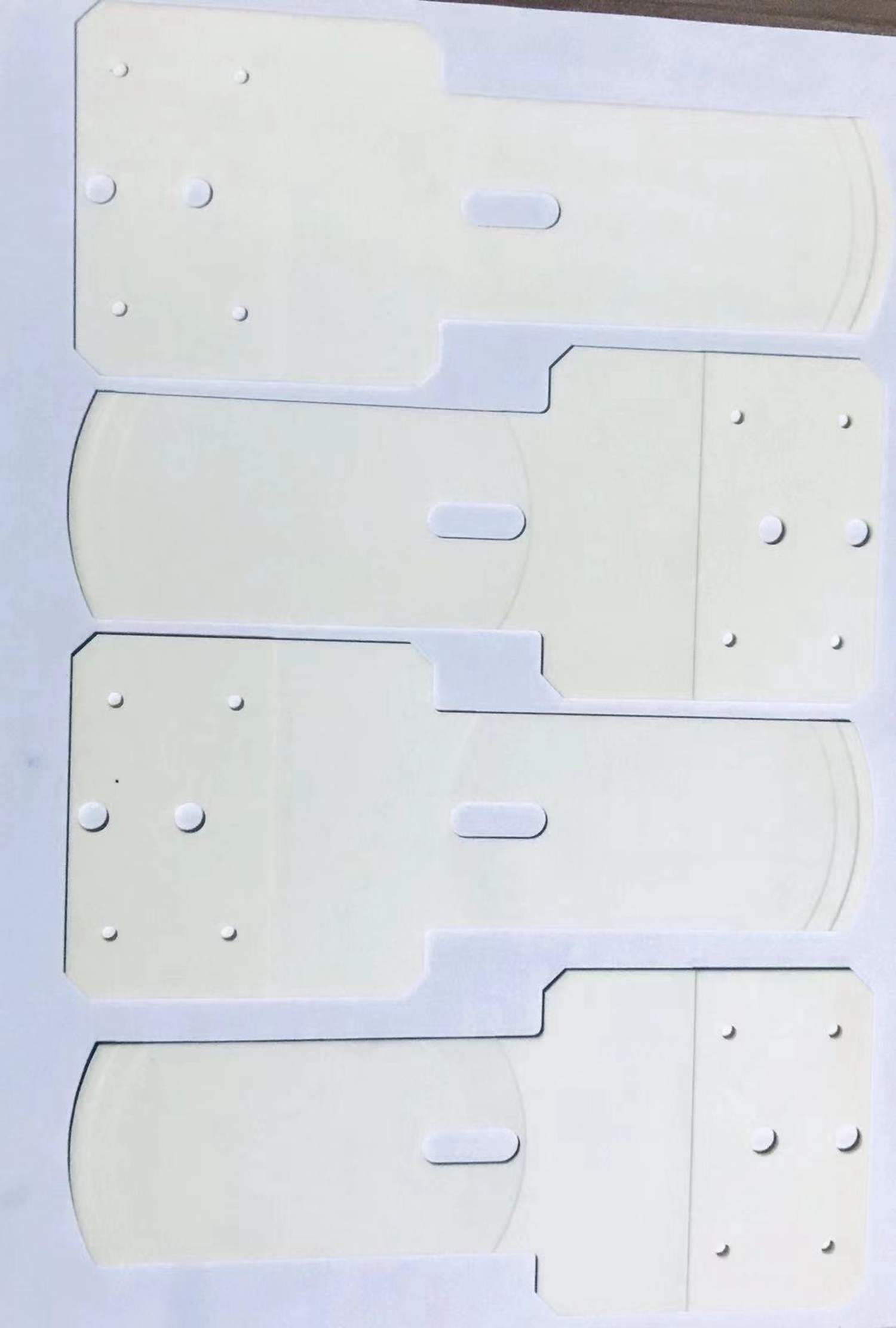
一種晶圓傳輸裝置及其真空吸附機械手,該真空吸附機械手包括:手臂;固定在所述手臂上的吸附絕緣凸臺;設置在所述手臂和吸附絕緣凸臺內的真空氣道;所述吸附絕緣凸臺用于吸附待傳送晶圓的背面,所述吸附絕緣凸臺的硬度小于所述待傳送晶圓的背面的硬度。由于吸附絕緣凸臺的硬度小于待傳送晶圓的背面的硬度,故利用真空吸附機械手將晶圓傳送至所需位置之后,晶圓的背面中與真空吸附機械手接觸的位置不會形成印記,提高了晶圓的合格率。通用性強,能適應多種作業;工藝性好,便于維修調整。
注塑行業機械臂常稱為注塑機機械手、塑料機機械手,它可模仿人體上肢的部分功能代替人工用于自動剪水口、模內鑲件、模內貼標、模外組裝、整形、分類、堆疊、產品包裝、模具優化等等。且可以對其進行自動控制使其按照預定要求輸送制品或操持工具進行生產操作的自動化生產設備。注塑行業機械臂是為注塑生產自動化專門配備的機械,它可以在減輕繁重的體力勞動、改善勞動條件和安全生產;提高注塑成型機的生產效率、穩定產品質量、降低廢品率、降低生產成本、增強企業的競爭力等方面起到及其重要的作用。 如剛性差則會引起手臂在垂直平面內的彎曲變形和水平面內側向扭轉變形.
一種用于傳送晶圓的真空吸附機械手,其特征在于,包括:手臂;固定在所述手臂上的吸附絕緣凸臺;設置在所述手臂和吸附絕緣凸臺內的真空氣道;所述吸附絕緣凸臺呈環形,所述吸附絕緣凸臺所圍成的空間構成所述真空氣道的其中一段;位于所述吸附絕緣凸臺內的偽絕緣凸臺,所述偽絕緣凸臺與手臂一體成型,所述真空氣道的其中一段位于所述偽絕緣凸臺內;在垂直于所述手臂的方向上,所述吸附絕緣凸臺比所述偽絕緣凸臺突出;所述吸附絕緣凸臺用于吸附待傳送晶圓的背面,所述吸附絕緣凸臺的硬度小于所述待傳送晶圓的背面的硬度。機械手臂的應用場景有哪些呢?韶關正規晶圓運送機械吸臂銷售詞
為此,手臂一般都采用剛性較好的導向桿來加大手臂的剛度.珠海正規晶圓運送機械吸臂生產廠家
與傳統的SCARA型搬運機械手相比,蛙腿型機械手的傳動機構更簡單,剛性更高,且工作效率更高。如上圖所示,蛙腿型機械手手臂為對稱雙連桿的并聯結構,包括1對大臂和2對小臂。2個直驅電機分別通過2個同軸的旋轉軸連接大臂,大臂末端通過4個旋轉軸連接尺寸相同的2對小臂,2對小臂的末端又通過2個旋轉軸連接晶圓托盤。 該機械手雖然只有3個電機,但水平連桿卻有10個旋轉關節,因此對整個真空機械手建立旋轉關節坐標與末端晶圓托盤坐標之間的函數關系是一個復雜的過程珠海正規晶圓運送機械吸臂生產廠家
深圳市德澳美精密制造有限公司在機械及行業設備這一領域傾注了無限的熱忱和激情,德澳美一直以客戶為中心、為客戶創造價值的理念、以品質、服務來贏得市場,衷心希望能與社會各界合作,共創成功,共創輝煌。相關業務歡迎垂詢。
- 陽江新款精密結構陶瓷價格信息 2025-02-23
- 陽江庫存晶圓運送機械吸臂銷售詞 2025-02-22
- 江門官方晶圓運送機械吸臂企業 2025-02-22
- 肇慶官方晶圓運送機械吸臂價格多少 2025-02-22
- 惠州原裝晶圓運送機械吸臂代理 2025-02-21
- 惠州新款晶圓運送機械吸臂賣價 2025-02-21
- 江蘇直銷精密結構陶瓷市場價 2025-02-21
- 徐州新款晶圓運送機械吸臂公司 2025-02-20
- 汕尾銷售精密結構陶瓷什么價格 2025-02-20
- 江蘇官方晶圓運送機械吸臂代理 2025-02-20
- 吉林穩定的機器視覺軟件 2025-02-23
- 江蘇機械助力臂生廠商 2025-02-23
- 樂清塑膠尼龍調濕機 2025-02-23
- 江蘇中頻感應電爐費用 2025-02-23
- 惠州精密平板直線電機廠 2025-02-23
- 四川大功率充電系統平臺 2025-02-23
- 定制蠟鑲機器人價格大全 2025-02-23
- 江蘇雙面噴砂機分類 2025-02-23
- 黑龍江模套鍛件批發 2025-02-23
- 蘇州汽車電磁鐵繞線機現貨供應 2025-02-23