韶關進口晶圓運送機械吸臂價格多少
為了解決使用機器語言編寫應用程序所帶來的一系列問題,人們首先想到了使用助記符號來代替不容易記憶的機器指令。這種助記符號來表示計算機指令的語言稱為符號語言,也稱匯編語言。在匯編語言中,每一條用符號來表示的匯編指令與計算機機器指令一一對應;記憶難度**減少了,不僅易于檢查和修改程序錯誤,而且指令、數據的存放位置可以由計算機自動分配。用匯編語言編寫的程序稱為源程序,計算機不能直接識別和處理源程序,必須通過某種方法將它翻譯成為計算機能夠理解并執行的機器語言,執行這個翻譯工作的程序稱為匯編程序。直角坐標系機械手臂,球坐標系機械手臂,極坐標機械手臂.韶關進口晶圓運送機械吸臂價格多少
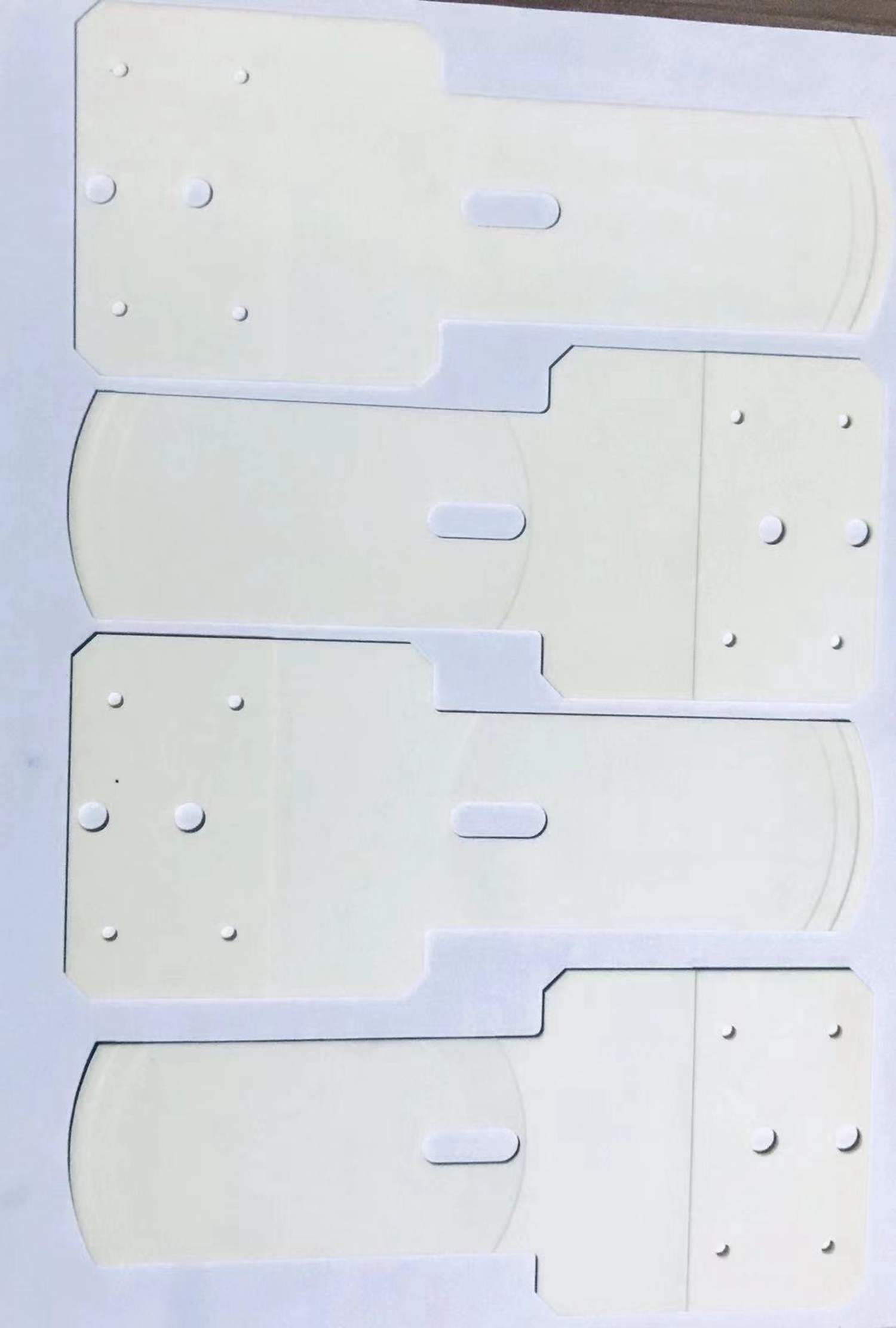
可選地,所述托板包括:
主板;
排列成八字形的***支板和第二支板,在所述主板的同一側與所述主板固定連接;
所述主板靠近所述***支板和第二支板的一端、所述***支板遠離所述主板的一端、所述第二支板遠離所述主板的一端均設置有所述絨毛墊。
可選地,所述表面為平面。
另外,本實用新型還提供了一種晶圓傳輸裝置,其包括上述任一所述的機械手臂。
在本實用新型的技術方案中,機械手臂傳送晶圓時,晶圓放置在托板的表面,并與絨毛墊接觸,借助晶圓與絨毛墊的絨毛之間的范德華力,晶圓被穩穩地附著在機械手臂上,不易發生平移,這樣不僅可以避免發生機械手臂碰傷,還可以提高晶圓的傳送速度以提高生產效率。
通過以下參照附圖對本實用新型的示例性實施例的詳細描述,本實用新型的其它特征、方面及其優點將會變得清楚。 東莞新款晶圓運送機械吸臂代理廠家柔性機械臂是一個非常復雜的動力學系統,其動力學方程具有非線性、強耦合、實變等特點。
晶圓是指硅半導體集成電路制作所用的硅晶片,由于其形狀為圓形,故稱為晶圓;在硅晶片上可加工制作成各種電路元件結構,而成為有特定電性功能的集成電路產品。
晶圓的原始材料是硅,而地殼表面有用之不竭的二氧化硅。二氧化硅礦石經由電弧爐提煉,**化,并經蒸餾后,制成了高純度的多晶硅,其純度高達99.9%。
晶圓是制造半導體芯片的基本材料,半導體集成電路**主要的原料是硅,因此對應的就是硅晶圓。
電鍍:
到這一步,晶圓基本上就完成了,現在要在晶圓上鍍一層硫酸銅,銅離子會從正極走向負極。
拋光:
然后將Wafer進行打磨,到這一步晶圓就真正的完成了。
切割:
對晶圓進行切割,值得一提的是晶圓十分易碎,因此對切割的工藝要求也是非常高的。
測試:
測試分為三大類:功能測試、性能測試、抗老化測試。大致測試模式如下:接觸測試、功耗測試、輸入漏電測試、輸出電平測試、動態參數測試、模擬信號參數測試等等。全部測試都通過的,就是正片;部分測試未通過,但正常使用無礙,這是白片;未開始測試,就發現晶圓具有瑕疵的,這是黑片。
柔性機械臂在工業、**等應用領域中占有十分重要的地位。

工業機械臂定義為“其操作機是自動控制的,可重復編程、多用途,并可以對3個以上軸進行編程。它可以是固定式或者移動式。在工業自動化應用中使用”。操作機又定義為“是一種機器,其機構通常由一系列相互鉸接或相對滑動的構件所組成。它通常有幾個自由度,用以抓取或移動物體(工具或工件)。”所以對工業機械臂可能理解為:擬人手臂、手腕和手功能 的機械電子裝置;它可把任一物件或工具按空間位姿(位置和姿態)的時變要求進行移動,從而完成某一工業生產的作業要求。 通用性強,能適應多種作業;工藝性好,便于維修調整。汕頭銷售晶圓運送機械吸臂生產廠家
一般也都裝在手臂上。所以手臂的結構、工作范圍、承載能力和動作精度都直接影響機械手的工作性能。韶關進口晶圓運送機械吸臂價格多少
建模理論柔性機械臂動力學方程的建立主要是利用Lagrange方程和NeWton-Euler方程這兩個相當有代表性的方程。另外比較常用的還有變分原理,虛位移原理以及Kane方程的方法。而柔性體變形的描述是柔性機械臂系統建模與控制的基礎。因此因首先選擇一定的方式描述柔性體的變形,同時變形的描述與系統動力學方程的求解關系密切。[3]柔性體變形的描述主要有以下幾種:1)有限元法;2)有限段法;3)模態綜合法;4)集中質量法;動力學方程的建立無論是連續或離散的動力學模型,其建模方法主要基于兩類基本方法:矢量力學法和分析力學法。應用較***同時也是比較成熟的是Newton-Euler公式、Lagrange方程、變分原理、虛位移原理和Kane方程。 韶關進口晶圓運送機械吸臂價格多少
行路致遠,砥礪前行。深圳市德澳美精密制造有限公司致力成為與您共贏、共生、共同前行的戰略伙伴,更矢志成為機械及行業設備富有影響力的企業,與您一起飛躍,共同成功!
- 江門官方晶圓運送機械吸臂企業 2025-02-22
- 惠州原裝晶圓運送機械吸臂代理 2025-02-21
- 惠州新款晶圓運送機械吸臂賣價 2025-02-21
- 江蘇直銷精密結構陶瓷市場價 2025-02-21
- 徐州新款晶圓運送機械吸臂公司 2025-02-20
- 汕尾銷售精密結構陶瓷什么價格 2025-02-20
- 江蘇官方晶圓運送機械吸臂代理 2025-02-20
- 汕尾新款微孔陶瓷真空吸盤設計 2025-02-19
- 南京直銷晶圓運送機械吸臂價格 2025-02-19
- 肇慶微孔陶瓷真空吸盤什么價格 2025-02-19
- 洋馬柴油機礦山泵帶智能監控 2025-02-22
- 四川電動振動刀 2025-02-22
- 全國齒輪泵訂制價格 2025-02-22
- 湖北非標助力臂價格 2025-02-22
- 安徽JX-0670BD機械手自動化數控車床多少錢一臺 2025-02-22
- 寧波工廠尾氣風管源頭工廠 2025-02-22
- 東莞多電平逆變器電池包測試系統 2025-02-22
- 無錫家電包裝箱機器人自動碼垛單元供應商推薦 2025-02-22
- 湖南四效強制循環結晶器價格 2025-02-22
- 黃浦區麒麟系統主機系統 2025-02-22