
堆垛機的應用場景非常頻繁,主要包括以下幾個方面:工業制造領域原材料倉庫:在工廠中,用于存儲各種原材料。例如,在鋼鐵廠,堆垛機可以將不同規格的鋼材,如鋼板、鋼卷等存放在立體貨架上。它能夠根據生產計劃準確地取出所需的原材料,確保生產線的順暢運行。對于需要多種原材料且存儲量較大的工廠,堆垛機通過高效的存取操作,減少了人工搬運的時間和勞動強度,提高了原材料供應的及時性。半成品和成品倉庫:在汽車制造、機械加工等行業,堆垛機可存儲半成品和成品。以汽車制造為例,它能存儲汽車發動機、變速器等大型零部件,以及整車成品。通過與生產管理系統連接,堆垛機可以按照生產進度或者銷售訂單快速地存取貨物。對于成品汽車的存儲,堆垛機能夠在有限的空間內存儲更多的車輛,提高了倉庫的空間利用率。堆垛機貨叉抓取機構,用于抓取貨物并進行堆放操作。重慶巷道堆垛機由

堆垛機的優點和局限性優點高效性:能夠快速地完成貨物的存取操作,相比傳統的人工搬運和存儲方式,很大程度提高了倉庫的運營效率。其運行速度可以根據實際需求進行調整,在高峰作業時期可以高速運行。空間利用率高:由于可以利用倉庫的高度空間,建設立體倉庫,堆垛機使倉庫的存儲容量得到明顯提高。一般來說,立體倉庫的存儲密度是普通平庫的數倍。準確性高:在控制系統的精確指揮下,堆垛機能夠準確地將貨物放置到*的貨位,并且取出貨物時也很少出現錯誤,減少了貨物存儲和分揀過程中的損耗。局限性成本高:堆垛機本身的設備購置成本較高,而且需要配套建設立體倉庫,包括貨架、軌道等設施,初期投資較大。同時,其維護和保養也需要專業的技術人員和一定的費用投入。靈活性相對較差:堆垛機通常是在固定的巷道內運行,只能存取所在巷道貨架上的貨物。如果倉庫的貨物存儲布局發生較大變化或者需要處理一些特殊形狀、超大尺寸的貨物,可能需要對堆垛機的軌道或者貨叉等部件進行調整,操作相對復雜。子母穿梭車巷道堆垛機備案立柱和橫梁構成了堆垛機的主體框架。

堆垛機的電氣控制系統控制器:是堆垛機的“大腦”,它可以是可編程邏輯控制器(PLC)或其他專門使用控制器。通過預先編寫的程序,控制器能夠協調堆垛機的行走、升降和貨叉伸縮等動作,實現自動化的貨物存取操作。例如,它可以根據倉庫管理系統(WMS)發送的指令,精確地控制堆垛機移動到*的貨架位置,完成貨物的存入或取出任務。傳感器系統:包括位置傳感器、速度傳感器等。位置傳感器用于確定堆垛機在巷道內的位置、載貨臺的高度以及貨叉的伸縮位置等。例如,通過激光測距傳感器或旋轉編碼器等,可以精確地測量堆垛機相對于貨架的位置,實現高精度的定位。速度傳感器則用于監測堆垛機運行速度,以保證其運行在安全速度范圍內,并且能夠根據速度反饋進行速度調節。
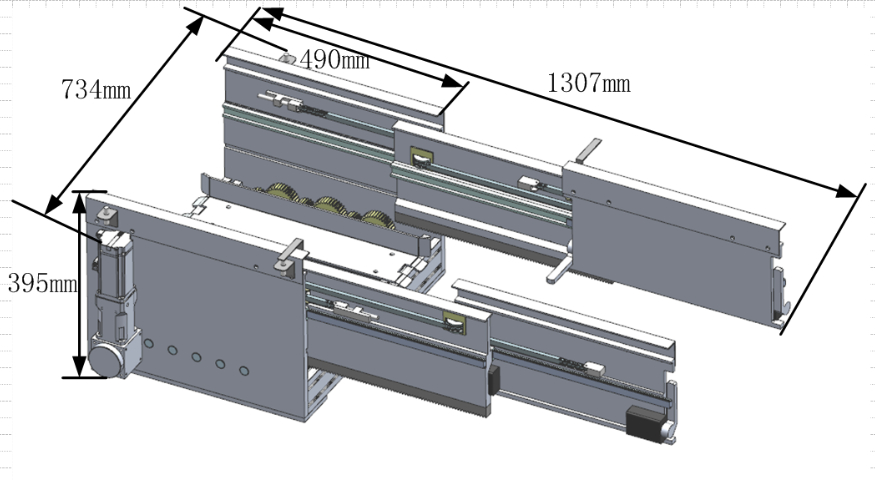
堆垛機結構主要有:水平行走結構、提升機構、取放貨機構、電氣柜和蓄電池等部分組成。堆垛機本體具有足夠的剛度和強度,整個結構部分布局緊湊、強度高、剛性好。水平行走機構是有軌巷道堆垛機的重要組成部分,它主要由下橫梁、行走電機、主動車輪、被動車輪、水平導向輪、安全夾鉤等組成。基本功能是通過減速電機驅動主動行走輪組在地軌上運動,以一定的速度安全可靠地完成巷道堆垛機沿巷道方向的水平行走運動。下橫梁導向輪通過支架固定在下橫梁上,使有軌巷道堆垛機水平運行時,能夠沿著地軌行走而不跑偏,起導向的作用。安全夾鉤可保證堆垛機不致傾翻。堆垛機是倉儲設備中的起重運輸機,用于貨物搬運和堆垛,通過計算機控制實現精確定位和堆放。
單伸位堆垛機與雙伸位堆垛機的區別作業效率和靈活性單伸位堆垛機:作業效率相對較為穩定,在存取單一側面的貨物時,由于其結構簡單,動作較為直接,運行速度可以相對較快。但是如果需要頻繁更換存取貨物的貨架側面(例如由于貨物出入庫的位置分布變化),單伸位堆垛機就需要花費更多的時間在通道中運行調整位置。它比較適合貨物出入庫位置相對固定,且對存儲密度要求不是特別高的倉庫環境。雙伸位堆垛機:具有更高的靈活性,能夠根據倉庫管理系統的指令,快速地從貨架的兩側進行貨物存取。不過,雙伸位貨叉的結構相對復雜,每次操作貨叉的伸縮時間可能會比單伸位貨叉略長,而且雙伸位堆垛機的控制系統也更為復雜,在進行一些復雜的貨物存取任務時,可能需要更多的時間來規劃路徑和操作貨叉。但是總體而言,在處理不同出入庫任務的綜合效率上,雙伸位堆垛機在合適的場景下更具優勢。堆垛機平穩工作的更高垂直升降速度可以達到180m/min,這很大提高了工作效率。冷庫巷道堆垛機多少錢
堆垛機的機械部件復雜,維護難度較大。重慶巷道堆垛機由
轉軌堆垛機的工作原理直軌段工作:在巷道直軌段運行時,堆垛機的走行電機驅動走行輪,使堆垛機沿天地軌方向運動,升降臺在提升電機的驅動下帶動載貨臺升降,貨叉電機驅動貨叉完成貨物的存取操作,與一般直軌堆垛機的工作方式相同。轉軌工作:以四巷道為例,當堆垛機需要從a1軌道切換到a2軌道運行時,相應的轉軌裝置會根據系統指令將ab段彎軌道接上a2軌道和b轉軌直段,堆垛機即可運行到a2巷道進行出入庫作業;當堆垛機需要從a1軌道切換到a3軌道運行時,a2巷道對應的轉軌裝置先將ab段彎軌道與b轉軌段斷開,a3巷道對應的轉軌裝置再將ab段彎軌道接上a3軌道和b轉軌直段,堆垛機便能順利通過a2巷道的轉軌裝置運行到a3巷道進行出入庫作業,從而實現堆垛機在任意巷道之間的切換。重慶巷道堆垛機由





