
電池電量不足:光伏清潔機器人通常依靠電池提供動力,以實現自主移動和清潔作業。一旦電池電量不足,機器人很可能在清潔途中提前停止工作。這意味著部分光伏板無法完成清潔任務,未清潔的光伏板因表面臟污問題,發電效率會明顯降低。尤其是在連續陰天、光照匱乏的情況下,機器人所依賴的光伏充電系統無法正常工作,充電受限,電量問題會更加突出。例如,在南方的梅雨季節,連續半個月的陰雨天氣使得機器人充電困難,電量常常無法滿足清潔需求。在某光伏電站,由于電池電量不足,機器人只能完成 60% 的清潔任務,導致該電站在這段時間內發電量下降了 12% 左右。由行業精英組成的研發團隊,智能遠程操作應用于光伏清潔機器人,實現便捷操控。湖南直銷光伏清潔機器人共同合作

競爭清潔資源:在一些區域,可能存在多個光伏電站共用清潔資源的情況。例如,在一個集中式光伏產業園區內,有多個不同業主的光伏電站,而清潔服務可能由同一家公司提供。若光伏清潔機器人的調配不合理,某個電站的清潔時間被壓縮,清潔工作不充分。例如,在用電高峰期,為了保障部分重點電站的發電,可能會減少對其他電站的清潔資源投入。光伏板臟污影響發電,導致該電站發電量無法達到預期。在某光伏產業園區,由于清潔資源調配不合理,部分電站的湖南直銷光伏清潔機器人共同合作科技改變生活,智慧賦能產業。

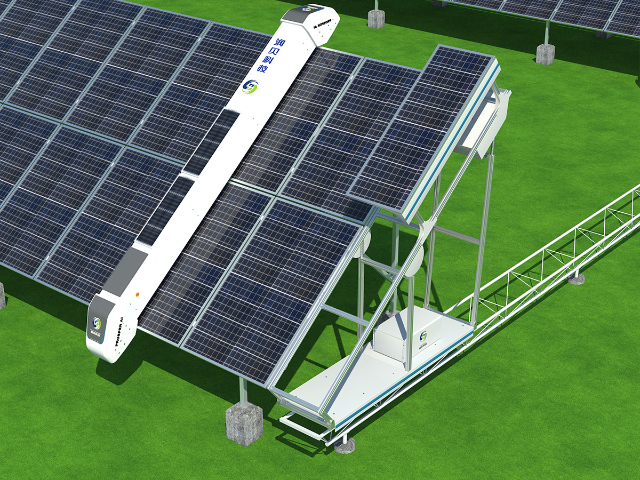
軌道損壞:對于采用軌道運行的光伏清潔機器人,軌道是其運行的基礎。若軌道出現損壞,如變形、斷裂等情況,機器人的運行將受到阻礙。軌道在長期使用過程中,可能會因承受機器人的重量、溫度變化、外力撞擊等因素而發生變形。例如,在冬季寒冷地區,軌道可能因熱脹冷縮而出現裂縫;在有重型設備經過的區域,軌道可能會被壓變形。軌道損壞后,機器人運行時會出現卡頓、脫軌等問題,無法正常清潔光伏板,臟污不斷積累。若維修不及時,問題還會進一步惡化。在某光伏電站,由于軌道變形未及時維修,一個月內機器人因軌道問題無法正常工作的時間累計達到 5 天,該電站的發電量下降了 4% 左右。
系統可擴展性:該機器人系統具備出色的可擴展性,能夠根據光伏電站的規模大小和實際需求,靈活地增加或減少機器人數量。系統采用分布式架構設計,各個機器人之間可以實現協同工作,并且能夠與電站的整體管理系統無縫對接。在小型的分布式光伏電站中,可以先部署少量的機器人進行試點運行;隨著電站規模的擴大和需求的增加,可以隨時增加機器人數量,組成一個高效的清潔團隊。這種可擴展性為系統的升級和擴容提供了便利,使設備能夠更好地適應不同階段的發展需求,避免了因設備升級而導致的重復投資。光伏清潔機器人能清潔頑固污漬,提升光伏板透光率。
爬坡能力不足:在山地等具有坡度的光伏電站中,光伏板通常安裝在不同坡度的山坡上。若光伏清潔機器人的爬坡能力不足,就無法順利到達高處的光伏板進行清潔。一般來說,山地光伏電站的坡度在 10° - 30° 之間,部分區域甚至可達 40°。爬坡能力不足的機器人在面對這些坡度時,可能會出現動力不足、打滑等問題,無法到達指定位置。高處的光伏板長期處于臟污狀態,發電效率降低。例如,在某山地光伏電站,由于機器人爬坡能力不足,約 30% 的高處光伏板清潔不到位,這些光伏板的發電效率比其他區域低 20% - 30% ,從而拉低了整個電站的發電量,每年發電量損失約為 10%。光伏清潔機器人的雙無刷電機具備高轉速優勢,搭配高容量蓄電池,可快速完成清潔任務。云南國內光伏清潔機器人設備廠家
機器人自身同時具備內部自供與外部自取兩種供電模式,徹底解決機器人在惡劣環境下的續航問題。湖南直銷光伏清潔機器人共同合作
軟件系統故障:清潔機器人的軟件系統如同其 “大腦”,一旦出現故障,其運行狀態將受到嚴重影響。導航系統是機器人準確抵達目標光伏板的關鍵,若導航系統出錯,例如衛星定位信號受到干擾或者地圖數據不準確,會使機器人無法準確計算出到達指定光伏板位置的路徑,導致其在電站內盲目移動,無法按時進行清潔。控制程序負責指揮機器人的清潔動作,若控制程序出現問題,如程序漏洞、參數錯誤等,會導致清潔動作無法正常執行,比如清潔刷頭無法正常轉動、刮片不能正確抬起或落下等。終致使部分光伏板清潔不徹底,發電量隨之受到影響。在某大型光伏電站,曾因軟件系統故障,導致一周內部分區域的光伏板清潔不及時,發電量下降了 5% 左右。湖南直銷光伏清潔機器人共同合作





