DWS+擺輪分揀系統中傳感器的作用。傳感器檢測:利用激光傳感器、光電傳感器等多種傳感器,實時監測物品的位置、尺寸、形狀和重量等信息。在物品進入分揀區域前,準確獲取其各項特征,為后續的分揀決策提供精細的數據支持。例如,在快遞物流行業中,通過對包裹的條碼掃描和尺寸測量,控制系統可以明確包裹的目的地和所需的分揀路徑13。數據處理與分析:控制系統中的PLC或計算機對傳感器采集到的大量數據進行快速處理和分析,根據預設的分揀規則和算法,迅速判斷出每件物品的分揀去向,確保分揀決策的準確性和及時性。 DWS +擺輪分揀設備的分揀軌道設計。廣東搭配OCRDWS+擺輪分揀案例
DWS+擺輪分揀系統可以做哪些定制化?分揀規則定制基于產品特性的分揀規則:根據不同行業產品的特殊要求進行分揀規則定制。例如,在醫藥行業,可按照藥品的劑型(如片劑、膠囊、注射劑)、儲存條件(如常溫、冷藏、冷凍)和有效期進行分揀;在電子行業,能根據電子產品的型號、規格、是否易碎等屬性來制定分揀規則。這樣可以確保產品在分揀過程中被精細分類,滿足不同產品的特殊物流需求。基于客戶需求的分揀規則:按照客戶的特定要求定制分揀方式。比如,對于一些大型電商客戶,可能需要將包裹按照不同的促銷活動、不同的銷售渠道(如線上店鋪、線下實體店)或者不同的客戶群體(如會員客戶、普通客戶)進行分揀。這種定制化分揀規則有助于更好地服務客戶,提高客戶滿意度。系統尺寸和布局定制適應場地空間的布局設計:根據實際使用場地的形狀、面積和空間限制,對DWS+擺輪分揀系統進行布局定制。例如,在空間狹長的倉庫,可以將設備設計成直線型布局,減少占地面積;在空間較為開闊但形狀不規則的場地,采用L型或U型布局,使包裹輸送線路更加合理,提高空間利用率。同時,還可以根據倉庫的出入口位置、貨物存儲區域分布等因素,優化系統的整體布局。 廣東搭配OCRDWS+擺輪分揀案例電商企業物流中心定制DWS+擺輪分揀案例。
如何根據物品的特性調整擺輪分揀技術的參數?物品尺寸調整擺輪間距:如果物品尺寸較大,需要適當增大擺輪之間的間距。例如,對于大型家電包裝,要保證擺輪間距足夠寬,以避免物品卡在擺輪之間。相反,對于小尺寸物品,如首飾盒,可以縮小擺輪間距,提高空間利用率,同時保證對小物品的有效推送。分揀出口尺寸:根據物品的比較大尺寸來確定分揀出口的大小。對于體積龐大的物品,如工業設備配件,分揀出口應足夠寬敞,以確保物品能夠順利通過。對于小型物品,出口尺寸可以相對較小,以精細地引導物品進入指定區域。傳感器檢測范圍:對于大尺寸物品,傳感器的檢測范圍要相應擴大,以準確獲取物品的完整輪廓和位置信息。例如,使用具有更寬檢測角度和更遠檢測距離的激光傳感器,確保在物品進入分揀區域前就能***掌握其信息。對于小尺寸物品,需要提高傳感器的精度,縮小檢測范圍,以便更精細地捕捉物品位置。物品重量調整擺輪動力:較重的物品,如裝滿書籍的紙箱,需要更大的擺輪動力來推動。這可以通過增加擺輪電機的功率或者調整電機的扭矩來實現。對于較輕的物品,如泡沫塑料包裝的小擺件,要適當降低擺輪動力,避免過度推送導致物品飛出指定軌道。
DWS+擺輪分揀搭配OCR技術優勢。提高識別準確率:OCR技術可以對包裹表面的文字、條碼等信息進行高精度識別,即使在包裹面單有褶皺、污漬、磨損或條碼部分損壞等情況下,也能更準確地提取信息,從而進一步提高分揀的準確性,減少因掃碼錯誤導致的分揀錯誤。增強信息獲取能力:能夠識別更豐富的文本信息,除了常規的條碼,還可以讀取包裹上的發件人、收件人、地址、產品名稱等文字內容,為物流企業提供更***的包裹數據,便于進行更精細的物流管理和數據分析。提升處理效率:快速準確的OCR識別可以使包裹在DWS系統中的處理速度加快,減少單個包裹的處理時間,從而提高整個分揀系統的效率,在高峰期能夠更快速地處理大量包裹。實現智能分揀決策:結合OCR識別出的文字信息和DWS系統測量的尺寸、重量等數據,可以制定更智能、更靈活的分揀策略。例如,根據收件地址的區域、產品的類型等進行分類分揀,優化分揀流程。 如何延長定制化的DWS+擺輪分揀系統的使用壽命?
擺輪分揀系統中擺輪的電機功率。驅動電機功率是決定擺輪分揀設備動力的關鍵因素。電機功率一般在0.2-2千瓦之間。功率較低的電機適用于分揀輕小貨物的設備,而對于需要分揀較重、較大貨物或者要求較高分揀速度的設備,則需要更高功率的電機。電機功率的選擇還需要考慮設備的耐用性、負載特性、工作時間等因素,要選用**品牌的電機例如。在連續長時間高負載工作的物流中心,需要選擇功率足夠且散熱性能良好的電機,以確保設備的穩定運行。 如何優化擺輪分揀系統的分揀效率?廣東瑞格勒DWS+擺輪分揀供應商
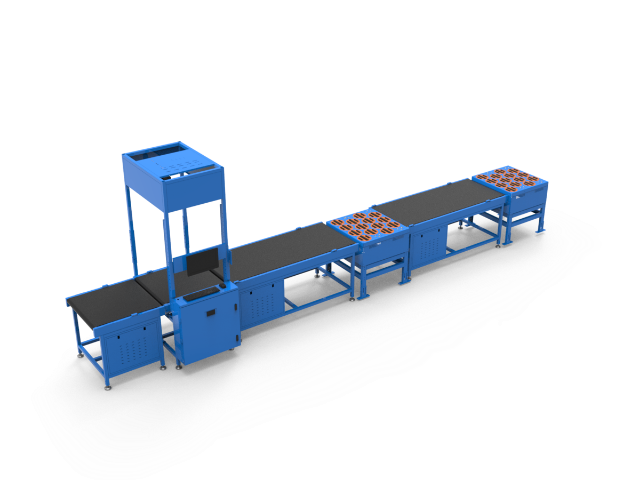
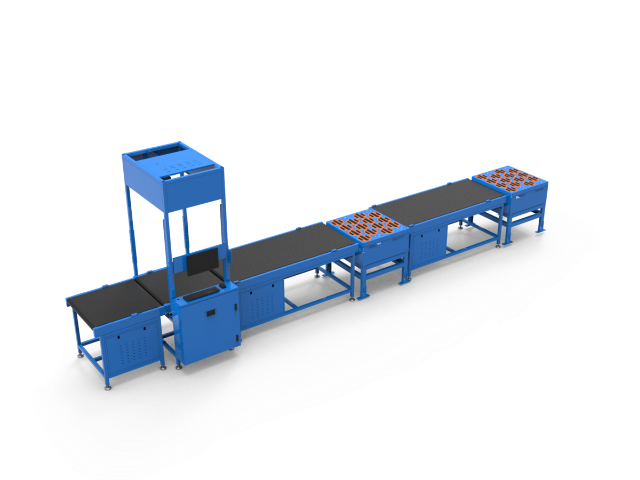
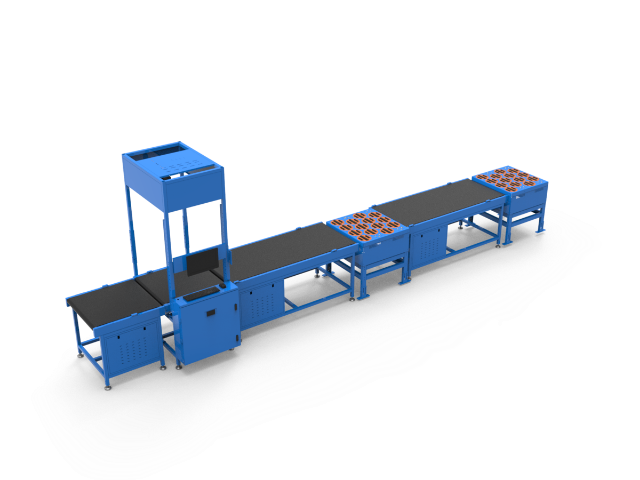
動態DWS+擺輪分揀搭配OCR技術。廣東搭配OCRDWS+擺輪分揀案例
DWS+擺輪分揀系統中如何實現分揀功能?精確的擺輪控制,伺服電機驅動:每個擺輪通常由**的伺服電機驅動,控制系統通過向伺服驅動器發送精確的控制信號,實現對擺輪轉動角度、速度和方向的精細控制。伺服電機具有高精度、高響應速度和可精確控制的特點,能夠在短時間內完成擺輪的轉動動作,將物品準確地導向指定的分揀道口。運動控制算法:采用先進的運動控制算法,如PID控制算法、模糊控制算法等,根據傳感器反饋的信息和預設的目標值,實時調整伺服電機的輸出,使擺輪的運動軌跡更加精細,提高分揀的準確性和效率。例如,在高速分揀過程中,通過實時調整擺輪的轉動速度和角度,確保物品能夠以比較好的姿態進入分揀道口,避免物品碰撞和堵塞。 廣東搭配OCRDWS+擺輪分揀案例